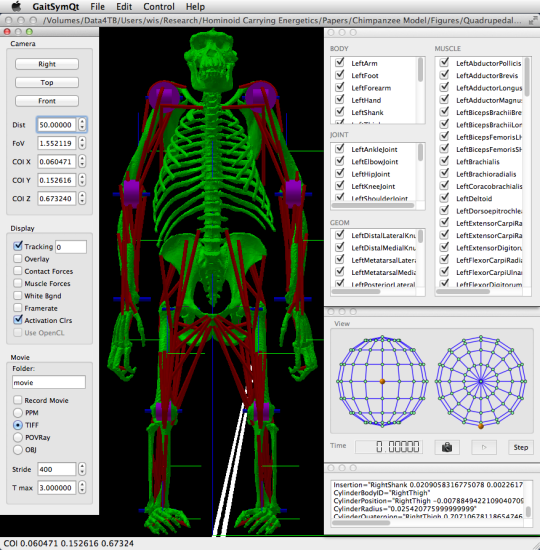
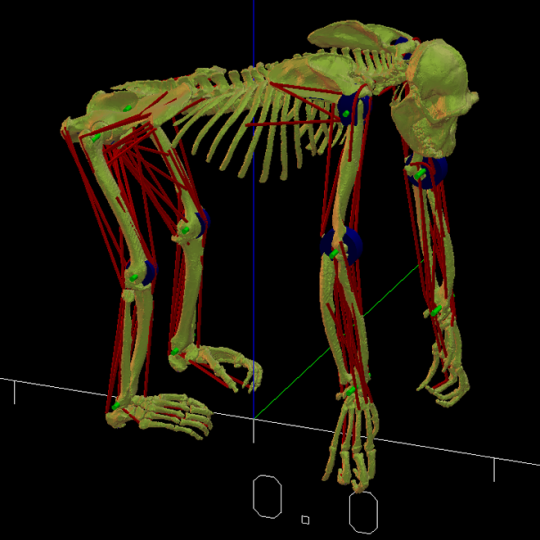
GaitSym egy előre dinamikus modellező program. Ez azt jelenti, hogy meg kell adni az erők és a program által használt Newton számítani a mozgásokat. Akkor töltse le innen beleértve egy sor emberi és nem emberi 2D és 3D modellek a kezdéshez. Használja a Open Dynamics Engine fizikai motor nem a legtöbb a kemény munka, és egy olyan fájlformátum és kijelző rendszer, így a felhasználónak nem kell semmilyen programozás. Azt is előírja, különböző izom modellek így az erők is, amelyeket közvetlenül izomaktiválás szintek és a horgok száma lehetővé teszi, hogy kell használni a globális optimalizálási eszközök, mint a genetikus algoritmusok. Fő jellemzői: Gyors, rugalmas és nagy Forward Dynamic modellező; Kifinomult Contact System; Minetti-Alexander és Umberger-Gerritsen-Martin Muscle Modellek Metabolikus költségbecslés; Via pontok és henger egyedi csomagolás a Muscle Paths; Tehetetlenségi Tenzor számítva háromszögháló vázlata; Világ, vagy helyi koordináta-rendszerek hatékony építésére. Teljes Source Code magába foglalja (C ++ lefordul MacOSX, Windows, Linux és egyéb Unix rendszerek); Kiegészítve számos emberi és nem emberi 2D és 3D modellek; Kiváló minőségű állóképek és animációk segítségével külső Ray-tracing.
Mi az új ebben a kiadásban:
- New csúszka közös
- Új izommodell beleértve ín csillapító, aktivációs kinetikája, nemlineáris tavasszal választ, és jobb numerikus stabilitás
- New box autóvezetők
- New box geom
- Új izom szíj, amely körbe léptet két párhuzamos hengerek
- Közvetlen pontfelhő megjelenítő
- Megszakítás túlzott csukló limit nyomatéka, illetve az adatok célt küszöbértékek
- A nyomkövető helyzetben lehet ellensúlyozni központosítani lánctalpas szimulációk
Hozzászólás nem található